Bennett A. Carley and Adeolayemi M. Bamgbelu and XiMing Zhang and Jason M. O'Kane
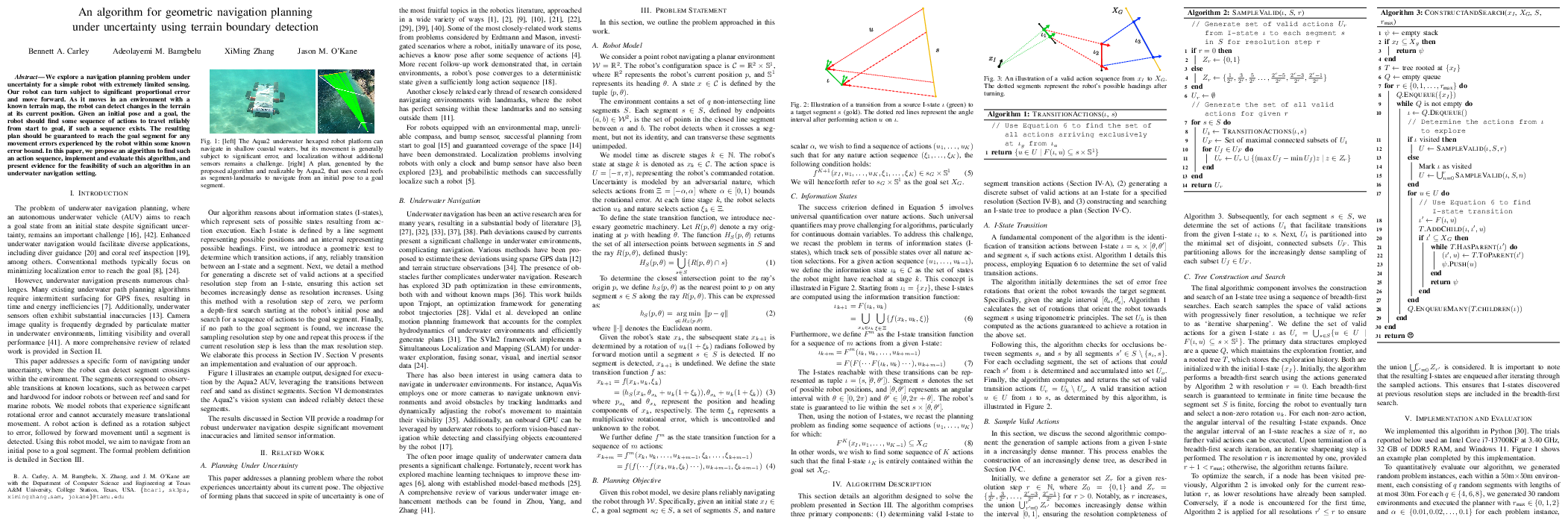
Bennett A. Carley and Adeolayemi M. Bamgbelu and XiMing Zhang and Jason M. O'KaneAbstract We explore a navigation planning problem under uncertainty for a simple robot with extremely limited sensing. Our robot can turn subject to significant proportional error and move forward. As it moves in an environment with a known terrain map, the robot can detect changes in the terrain at its current position. Given an initial pose and a goal, the robot should find some sequence of actions to travel reliably from start to goal, if such a sequence exists. The resulting plan should be guaranteed to reach the goal segment for any movement errors experienced by the robot within some known error bound. In this paper, we propose an algorithm to find such an action sequence, implement and evaluate this algorithm, and present evidence for the feasibility of such an algorithm in an underwater navigation setting.
@inproceedings{CarBam+25,
author = {Bennett A. Carley and Adeolayemi M. Bamgbelu and XiMing
Zhang and Jason M. O'Kane},
booktitle = {Proc. IEEE International Conference on Robotics and
Automation},
title = {An algorithm for geometric navigation planning under
uncertainty using terrain boundary detection},
year = {2025}
}